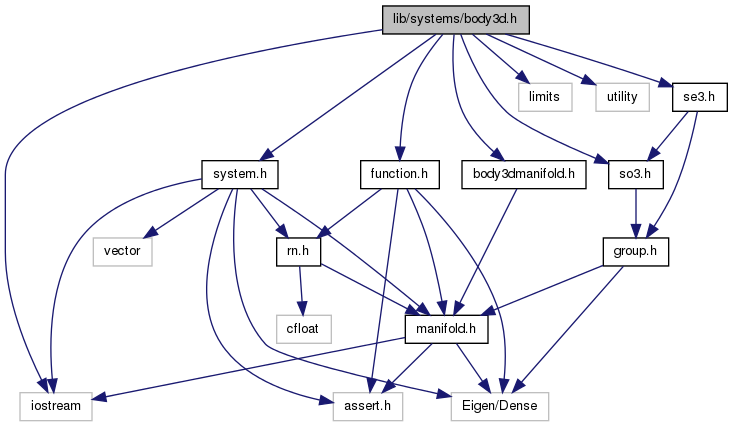
#include "system.h"#include "body3dmanifold.h"#include "so3.h"#include "se3.h"#include <limits>#include <iostream>#include <utility>#include "function.h"
Include dependency graph for body3d.h:
This graph shows which files directly or indirectly include this file:

Go to the source code of this file.
Classes | |
| class | gcop::Body3d< c > |
Namespaces | |
| namespace | gcop |
Typedefs | |
| typedef Matrix< double, 12, 1 > | gcop::Vector12d |
| typedef Matrix< double, 12, 12 > | gcop::Matrix12d |
| typedef Matrix< double, 12, 6 > | gcop::Matrix12x6d |
Functions | |
| static void | gcop::Gcay (Matrix3d &m1, const Vector3d &w, const Vector3d &J, double h, bool plus=true) |
