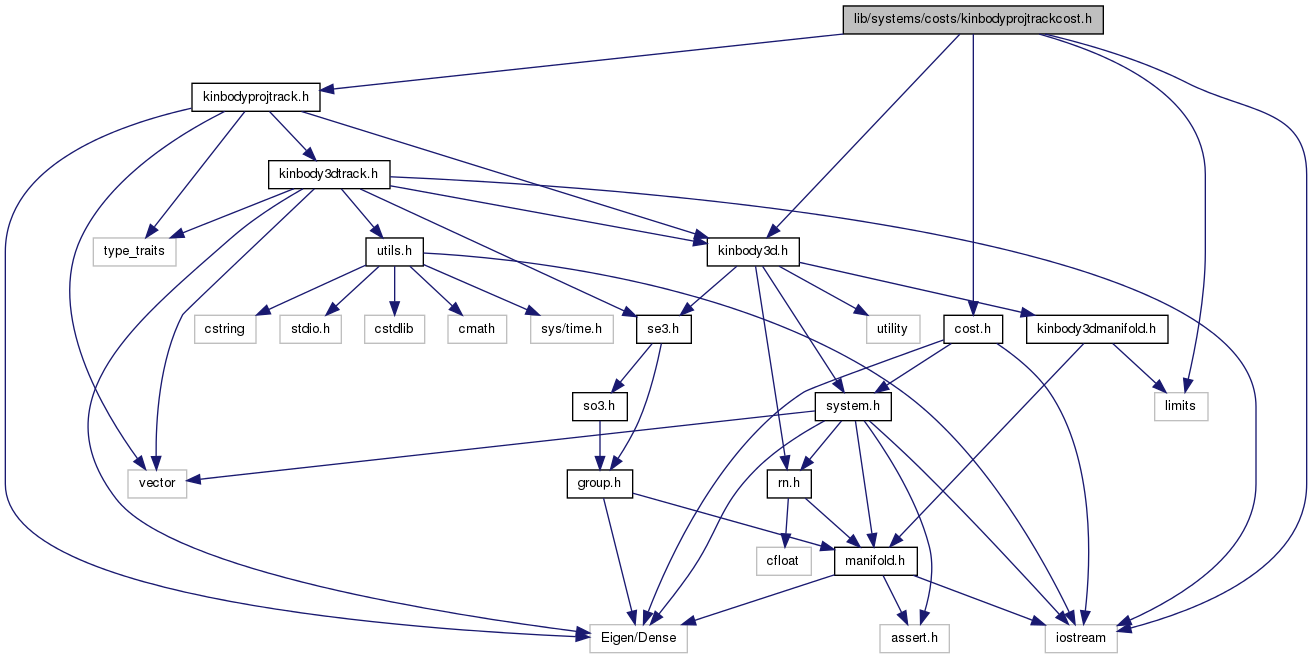
#include <limits>#include <iostream>#include "cost.h"#include "kinbodyprojtrack.h"#include "kinbody3d.h"
Include dependency graph for kinbodyprojtrackcost.h:
Go to the source code of this file.
Classes | |
| class | gcop::KinbodyProjTrackCost< _nu > |
Namespaces | |
| namespace | gcop |
Functions | |
| static Matrix3d | gcop::r3hat (const Vector3d &a) |
| static Vector3d | gcop::cross3 (Vector3d a, Vector3d b) |
