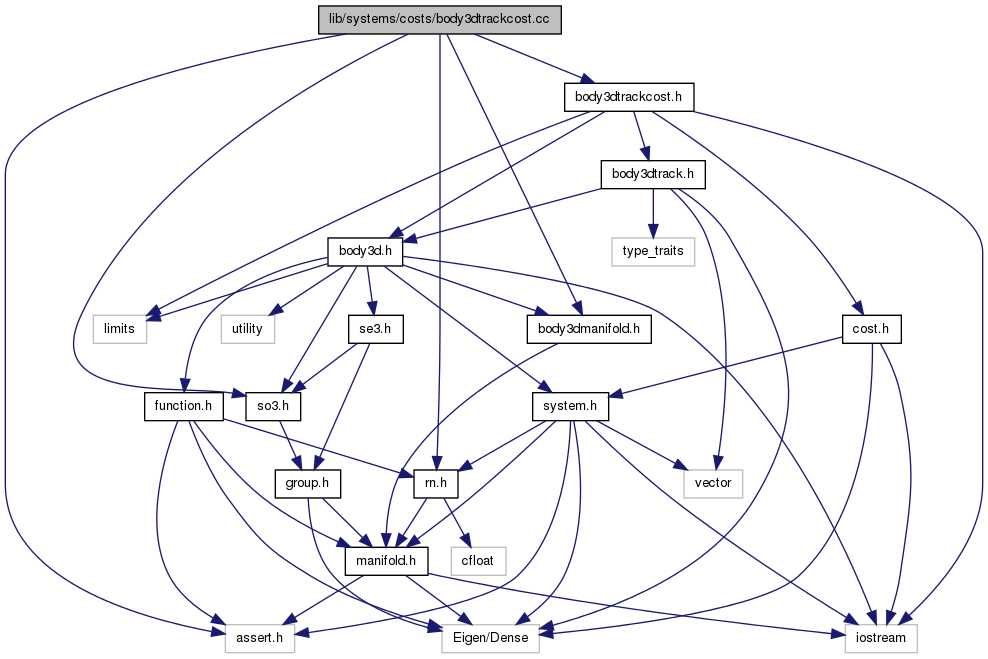
#include <assert.h>#include "body3dtrackcost.h"#include "body3dmanifold.h"#include "rn.h"#include "so3.h"
Include dependency graph for body3dtrackcost.cc:
Functions | |
| static Matrix3d | r3hat (const Vector3d &a) |
| static Vector3d | cross3 (Vector3d a, Vector3d b) |
Function Documentation
| static Vector3d cross3 | ( | Vector3d | a, |
| Vector3d | b | ||
| ) | [static] |
| static Matrix3d r3hat | ( | const Vector3d & | a | ) | [static] |
References gcop::SO3::hat(), and gcop::SO3::Instance().
