#include <kinrccarpath.h>
Public Member Functions | |
| KinRccarPath (KinRccar &sys, bool wheel_odometry=false, bool yaw_odometry=false, bool forces=false, bool estimate_length=false) | |
| virtual void | AddControl (const Vector2d &u, const Vector2d &v, double h) |
| virtual void | AddObservation (const vector< pair< int, Vector3d > > &z, Matrix4d cam_transform=MatrixXd::Identity(4, 4)) |
Public Attributes | |
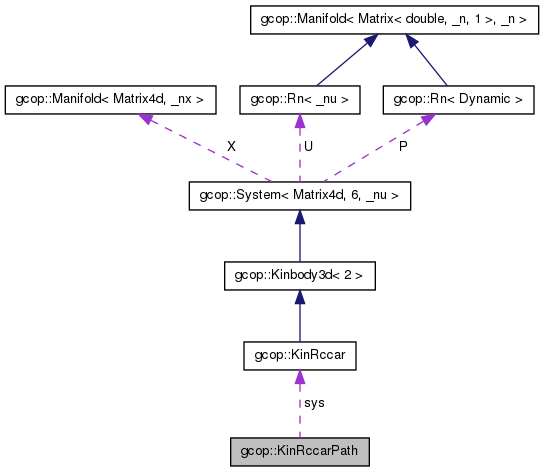
| KinRccar & | sys |
| system | |
| bool | wheel_odometry |
| bool | yaw_odometry |
| bool | extforce |
| is there a constant external force that need to be estimated | |
| bool | forces |
| is there a constant external force that need to be estimated | |
| bool | estimate_length |
| should the length of the car be tracked as a parameter | |
| vector< double > | ts |
| sequence of times (N+1 vector) | |
| vector< Matrix4d > | xs |
| sequence of states x=(g,v) (N+1 vector) | |
| vector< Vector2d > | us |
| sequence of inputs (N vector) | |
| vector< Vector2d > | vs |
| sequence of odometry (N vector) | |
| vector< Matrix4d > | xos |
| unoptimized trajectory | |
| vector< Vector2d > | uos |
| unoptimized trajectory | |
| VectorXd | p |
| observed landmark positions (2*m vector) and external force parameters (2 vector) | |
| vector< vector< pair< int, Vector3d > > > | zs |
| vector of vectors of landmark observations | |
| double | cp |
| noise covariance of poses (assume spherical) | |
| Vector2d | cv |
| noise covariance of odometry/gyro (assume diagonal) | |
| Vector2d | cw |
| noise covariance of control forces (assume diagonal) | |
Detailed Description
Kinematic RC Car Pose-track in 3D. Tracks odometry, controls, and landmarks.
Constructor & Destructor Documentation
| gcop::KinRccarPath::KinRccarPath | ( | KinRccar & | sys, |
| bool | wheel_odometry = false, |
||
| bool | yaw_odometry = false, |
||
| bool | forces = false, |
||
| bool | estimate_length = false |
||
| ) |
Member Function Documentation
| void gcop::KinRccarPath::AddControl | ( | const Vector2d & | u, |
| const Vector2d & | v, | ||
| double | h | ||
| ) | [virtual] |
| void gcop::KinRccarPath::AddObservation | ( | const vector< pair< int, Vector3d > > & | z, |
| Matrix4d | cam_transform = MatrixXd::Identity(4,4) |
||
| ) | [virtual] |
References estimate_length, extforce, p, xs, and zs.
Member Data Documentation
| double gcop::KinRccarPath::cp |
noise covariance of poses (assume spherical)
Referenced by KinRccarPath(), and gcop::KinRccarPathCost::L().
| Vector2d gcop::KinRccarPath::cv |
noise covariance of odometry/gyro (assume diagonal)
Referenced by KinRccarPath(), and gcop::KinRccarPathCost::L().
| Vector2d gcop::KinRccarPath::cw |
noise covariance of control forces (assume diagonal)
Referenced by KinRccarPath(), and gcop::KinRccarPathCost::L().
should the length of the car be tracked as a parameter
Referenced by AddObservation(), and gcop::KinRccarPathCost::L().
is there a constant external force that need to be estimated
Referenced by AddObservation(), and gcop::KinRccarPathCost::L().
is there a constant external force that need to be estimated
Referenced by gcop::KinRccarPathCost::L().
| VectorXd gcop::KinRccarPath::p |
observed landmark positions (2*m vector) and external force parameters (2 vector)
Referenced by AddObservation(), and KinRccarPath().
system
Referenced by AddControl(), and gcop::KinRccarPathCost::L().
| vector<double> gcop::KinRccarPath::ts |
sequence of times (N+1 vector)
Referenced by AddControl(), and KinRccarPath().
| vector<Vector2d> gcop::KinRccarPath::uos |
unoptimized trajectory
Referenced by AddControl(), and gcop::KinRccarPathCost::L().
| vector<Vector2d> gcop::KinRccarPath::us |
sequence of inputs (N vector)
Referenced by AddControl().
| vector<Vector2d> gcop::KinRccarPath::vs |
sequence of odometry (N vector)
Referenced by AddControl(), and gcop::KinRccarPathCost::L().
Referenced by gcop::KinRccarPathCost::L().
| vector<Matrix4d> gcop::KinRccarPath::xos |
unoptimized trajectory
Referenced by AddControl(), and KinRccarPath().
| vector<Matrix4d> gcop::KinRccarPath::xs |
sequence of states x=(g,v) (N+1 vector)
Referenced by AddControl(), AddObservation(), and KinRccarPath().
Referenced by gcop::KinRccarPathCost::L().
| vector< vector<pair<int, Vector3d> > > gcop::KinRccarPath::zs |
vector of vectors of landmark observations
Referenced by AddControl(), AddObservation(), and gcop::KinRccarPathCost::L().
The documentation for this class was generated from the following file:
- lib/systems/kinrccarpath.h
