#include <unscentedcorrector.h>
Public Types | |
| typedef Matrix< double, _nx, 1 > | Vectornd |
| typedef Matrix< double, _nu, 1 > | Vectorcd |
| typedef Matrix< double, _np, 1 > | Vectormd |
| typedef Matrix< double, _nx, _nx > | Matrixnd |
| typedef Matrix< double, _nx, _nu > | Matrixncd |
| typedef Matrix< double, _nx, _nz > | Matrixnrd |
| typedef Matrix< double, _nu, _nx > | Matrixcnd |
| typedef Matrix< double, _nu, _nu > | Matrixcd |
| typedef Matrix< double, _np, _np > | Matrixmd |
| typedef Matrix< double, _nx, _np > | Matrixnmd |
| typedef Matrix< double, _np, _nx > | Matrixmnd |
| typedef Matrix< double, _nz, 1 > | Vectorrd |
| typedef Matrix< double, _nz, _nz > | Matrixrd |
| typedef Matrix< double, _nz, _nx > | Matrixrnd |
| typedef Matrix< double, _nz, _nu > | Matrixrcd |
| typedef Matrix< double, _nz, _np > | Matrixrmd |
Public Member Functions | |
| UnscentedCorrector (System< T, _nx, _nu, _np > &sys, Sensor< T, _nx, _nu, _np, Tz, _nz > &sensor) | |
| virtual | ~UnscentedCorrector () |
| virtual bool | Correct (T &xb, double t, const T &xa, const Vectorcd &u, const Tz &z, const Vectormd *p=0, bool cov=true) |
Protected Attributes | |
| vector< Tz > | Zs |
| measurement sigma points | |
| Matrixrd | Pzz |
| internally used covariances | |
| Matrixnrd | Pxz |
| internally used covariances | |
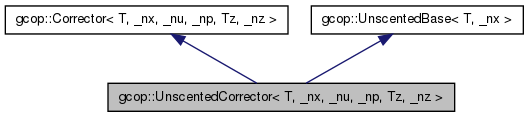
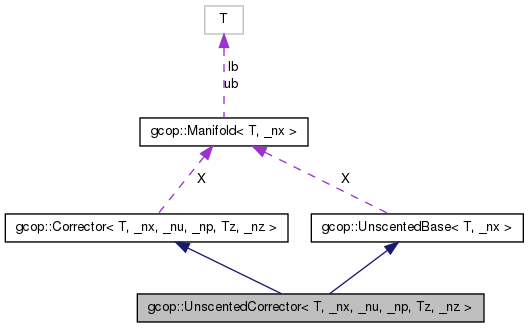
template<typename T = VectorXd, int _nx = Dynamic, int _nu = Dynamic, int _np = Dynamic, typename Tz = VectorXd, int _nz = Dynamic>
class gcop::UnscentedCorrector< T, _nx, _nu, _np, Tz, _nz >
Member Typedef Documentation
| typedef Matrix<double, _nu, _nu> gcop::UnscentedCorrector< T, _nx, _nu, _np, Tz, _nz >::Matrixcd |
Reimplemented from gcop::Corrector< T, _nx, _nu, _np, Tz, _nz >.
| typedef Matrix<double, _nu, _nx> gcop::UnscentedCorrector< T, _nx, _nu, _np, Tz, _nz >::Matrixcnd |
Reimplemented from gcop::Corrector< T, _nx, _nu, _np, Tz, _nz >.
| typedef Matrix<double, _np, _np> gcop::UnscentedCorrector< T, _nx, _nu, _np, Tz, _nz >::Matrixmd |
Reimplemented from gcop::Corrector< T, _nx, _nu, _np, Tz, _nz >.
| typedef Matrix<double, _np, _nx> gcop::UnscentedCorrector< T, _nx, _nu, _np, Tz, _nz >::Matrixmnd |
Reimplemented from gcop::Corrector< T, _nx, _nu, _np, Tz, _nz >.
| typedef Matrix<double, _nx, _nu> gcop::UnscentedCorrector< T, _nx, _nu, _np, Tz, _nz >::Matrixncd |
Reimplemented from gcop::Corrector< T, _nx, _nu, _np, Tz, _nz >.
| typedef Matrix<double, _nx, _nx> gcop::UnscentedCorrector< T, _nx, _nu, _np, Tz, _nz >::Matrixnd |
Reimplemented from gcop::Corrector< T, _nx, _nu, _np, Tz, _nz >.
| typedef Matrix<double, _nx, _np> gcop::UnscentedCorrector< T, _nx, _nu, _np, Tz, _nz >::Matrixnmd |
Reimplemented from gcop::Corrector< T, _nx, _nu, _np, Tz, _nz >.
| typedef Matrix<double, _nx, _nz> gcop::UnscentedCorrector< T, _nx, _nu, _np, Tz, _nz >::Matrixnrd |
| typedef Matrix<double, _nz, _nu> gcop::UnscentedCorrector< T, _nx, _nu, _np, Tz, _nz >::Matrixrcd |
| typedef Matrix<double, _nz, _nz> gcop::UnscentedCorrector< T, _nx, _nu, _np, Tz, _nz >::Matrixrd |
| typedef Matrix<double, _nz, _np> gcop::UnscentedCorrector< T, _nx, _nu, _np, Tz, _nz >::Matrixrmd |
| typedef Matrix<double, _nz, _nx> gcop::UnscentedCorrector< T, _nx, _nu, _np, Tz, _nz >::Matrixrnd |
| typedef Matrix<double, _nu, 1> gcop::UnscentedCorrector< T, _nx, _nu, _np, Tz, _nz >::Vectorcd |
Reimplemented from gcop::Corrector< T, _nx, _nu, _np, Tz, _nz >.
| typedef Matrix<double, _np, 1> gcop::UnscentedCorrector< T, _nx, _nu, _np, Tz, _nz >::Vectormd |
Reimplemented from gcop::Corrector< T, _nx, _nu, _np, Tz, _nz >.
| typedef Matrix<double, _nx, 1> gcop::UnscentedCorrector< T, _nx, _nu, _np, Tz, _nz >::Vectornd |
Reimplemented from gcop::Corrector< T, _nx, _nu, _np, Tz, _nz >.
| typedef Matrix<double, _nz, 1> gcop::UnscentedCorrector< T, _nx, _nu, _np, Tz, _nz >::Vectorrd |
Constructor & Destructor Documentation
| gcop::UnscentedCorrector< T, _nx, _nu, _np, Tz, _nz >::UnscentedCorrector | ( | System< T, _nx, _nu, _np > & | sys, |
| Sensor< T, _nx, _nu, _np, Tz, _nz > & | sensor | ||
| ) |
| gcop::UnscentedCorrector< T, _nx, _nu, _np, Tz, _nz >::~UnscentedCorrector | ( | ) | [virtual] |
Member Function Documentation
| bool gcop::UnscentedCorrector< T, _nx, _nu, _np, Tz, _nz >::Correct | ( | T & | xb, |
| double | t, | ||
| const T & | xa, | ||
| const Vectorcd & | u, | ||
| const Tz & | z, | ||
| const Vectormd * | p = 0, |
||
| bool | cov = true |
||
| ) | [virtual] |
Correction step.
- Parameters:
-
xb new belief state t time xa previous belief state u control inputs z measurement p parameters (optional) cov whether to update the covariance as well (true by default)
- Returns:
- true if success
Implements gcop::Corrector< T, _nx, _nu, _np, Tz, _nz >.
Member Data Documentation
Matrixnrd gcop::UnscentedCorrector< T, _nx, _nu, _np, Tz, _nz >::Pxz [protected] |
internally used covariances
Referenced by gcop::UnscentedCorrector< T, _nx, _nu, _np, Tz, _nz >::UnscentedCorrector().
Matrixrd gcop::UnscentedCorrector< T, _nx, _nu, _np, Tz, _nz >::Pzz [protected] |
internally used covariances
Referenced by gcop::UnscentedCorrector< T, _nx, _nu, _np, Tz, _nz >::UnscentedCorrector().
vector<Tz> gcop::UnscentedCorrector< T, _nx, _nu, _np, Tz, _nz >::Zs [protected] |
measurement sigma points
The documentation for this class was generated from the following file:
- lib/est/unscentedcorrector.h
