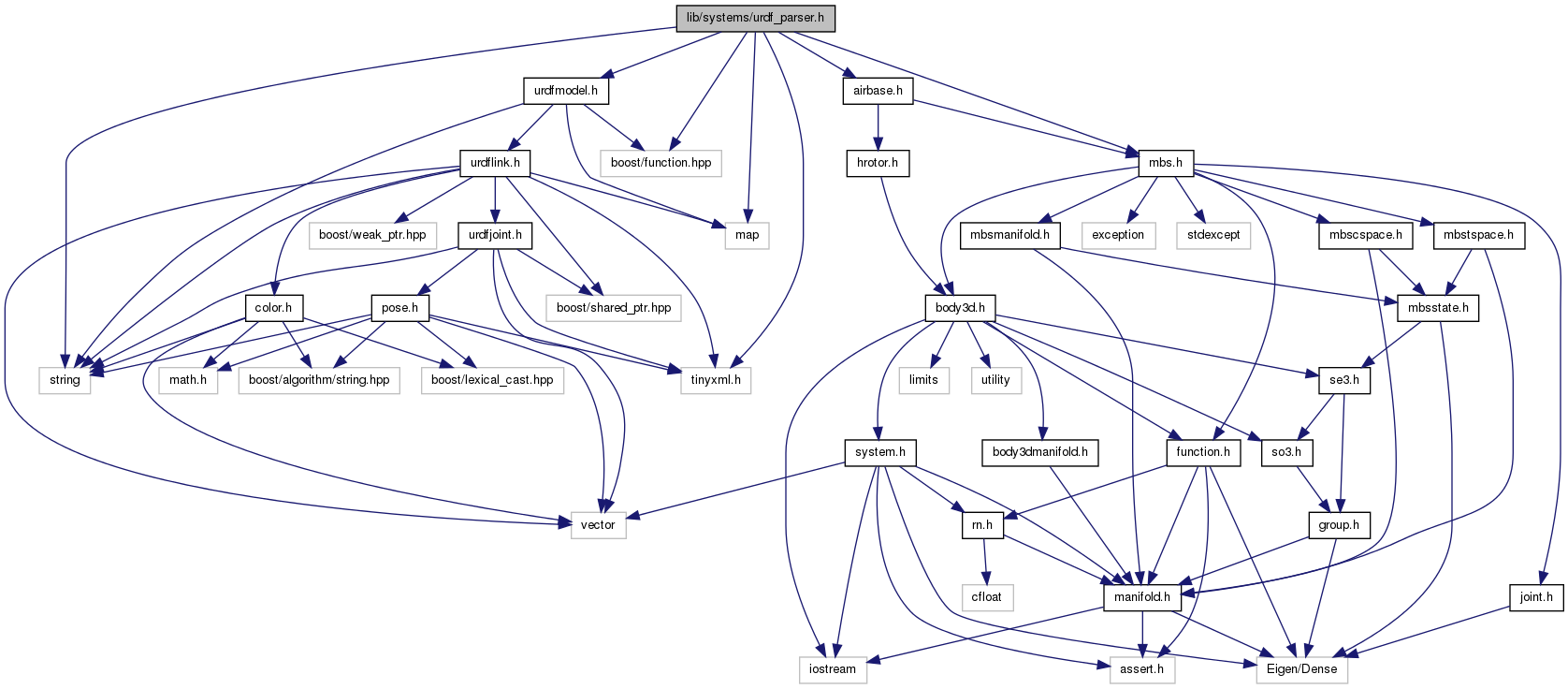
#include <string>#include <map>#include <tinyxml.h>#include <boost/function.hpp>#include "urdfmodel.h"#include "mbs.h"#include "airbase.h"
Include dependency graph for urdf_parser.h:
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Namespaces | |
| namespace | gcop_urdf |
Functions | |
| boost::shared_ptr< ModelInterface > | gcop_urdf::parseURDF (const std::string &xml_string) |
| void | gcop_urdf::transformtoprincipal (boost::shared_ptr< Link > link) |
| void | gcop_urdf::combineinertia (boost::shared_ptr< Link > clink, boost::shared_ptr< Link > plink, Pose posec_p) |
| void | gcop_urdf::assign (boost::shared_ptr< const Link > link, boost::shared_ptr< Link > parentlink, Pose cumpose) |
| void | gcop_urdf::aggregate (boost::shared_ptr< const Link > link, boost::shared_ptr< Link > parentlink, Pose cumpose) |
| gcop::Matrix4d | gcop_urdf::diffpose (Pose &posej_p, Pose &posei_p) |
| void | gcop_urdf::walkTree (boost::shared_ptr< Link > link, int level, int &index, boost::shared_ptr< gcop::Mbs > mbs) |
| gcop_urdf::mbsgenerator (const std::string &xml_string, gcop::Matrix4d &gposei_root, std::string type="FLOATBASE") | |
