|
ASCO Aerial Autonomy
|


All Classes Namespaces Files Functions Variables Typedefs Enumerations Enumerator Friends Macros Pages
|
ASCO Aerial Autonomy
|
#include <aerial_autonomy/controllers/builtin_controller.h>#include <aerial_autonomy/controllers/manual_rpyt_controller.h>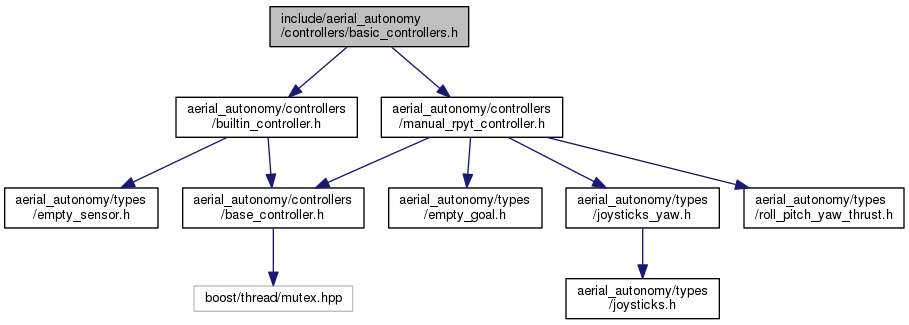
 1.8.6
1.8.6