#include <ba.h>
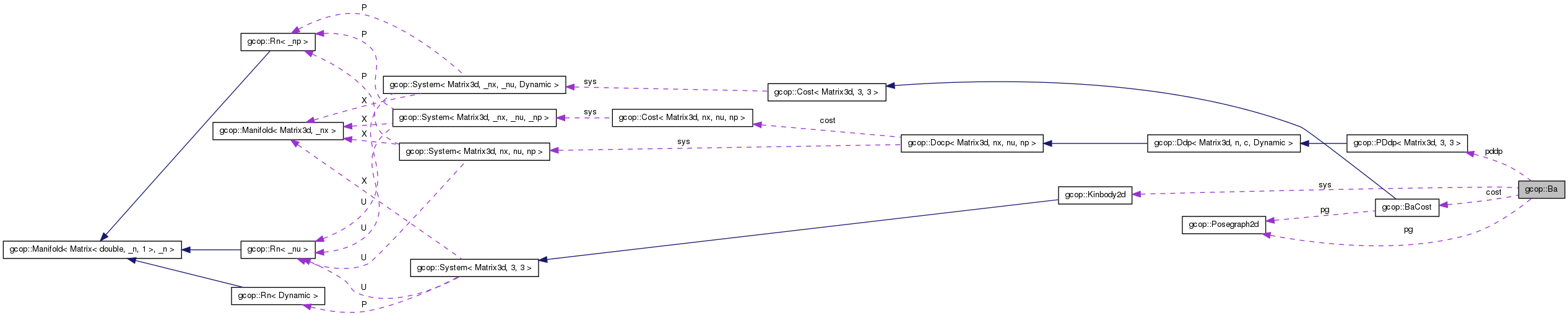
Collaboration diagram for gcop::Ba:
Public Member Functions | |
| Ba (Posegraph2d &pg) | |
Public Attributes | |
| Posegraph2d & | pg |
| pose graph | |
| Kinbody2d | sys |
| system | |
| BaCost | cost |
| cost function | |
| PDdp< Matrix3d, 3, 3 > | pddp |
| parametric discrete-mechanics optimal control | |
Detailed Description
Bundle adjustment based on optimal-control. This is a basic version using a kinematic model in SE(2). It is possible to plug-in any dynamical model without much overhead.
Constructor & Destructor Documentation
| Ba::Ba | ( | Posegraph2d & | pg | ) |
Bundle adjustment of pose-graph pg
- Parameters:
-
pg pose-graph
Member Data Documentation
cost function
| PDdp<Matrix3d, 3, 3> gcop::Ba::pddp |
parametric discrete-mechanics optimal control
pose graph
system
The documentation for this class was generated from the following files:
