#include <flat.h>
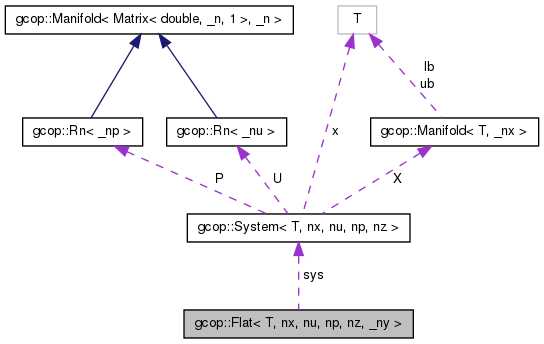
Collaboration diagram for gcop::Flat< T, nx, nu, np, nz, _ny >:
Public Member Functions | |
| Flat (System< T, nx, nu, np, nz, _ny > &sys, int ny=_ny, int ox=1, int ou=2) | |
| virtual bool | State (T &x, const vector< Vectoryd > &ys) |
| virtual bool | Control (Vectorcd &u, const vector< Vectormd > &ys) |
Public Attributes | |
| System< T, nx, nu, np, nz > & | sys |
| system | |
| int | ny |
| flat output dimension | |
| int | ox |
| state order | |
| int | ou |
| control order | |
Detailed Description
template<typename T, int nx = Dynamic, int nu = Dynamic, int np = Dynamic, int nz = Dynamic, int _ny = Dynamic>
class gcop::Flat< T, nx, nu, np, nz, _ny >
General flat output definition
Author: Marin Kobilarov (c) 2005--2013
Constructor & Destructor Documentation
template<typename T , int nx = Dynamic, int nu = Dynamic, int np = Dynamic, int nz = Dynamic, int _ny = Dynamic>
| gcop::Flat< T, nx, nu, np, nz, _ny >::Flat | ( | System< T, nx, nu, np, nz, _ny > & | sys, |
| int | ny = _ny, |
||
| int | ox = 1, |
||
| int | ou = 2 |
||
| ) |
Define flat outputs for system s with state order ox and control order ou
- Parameters:
-
sys system ny flat output dimension ox state order ou control order
Member Function Documentation
template<typename T , int nx = Dynamic, int nu = Dynamic, int np = Dynamic, int nz = Dynamic, int _ny = Dynamic>
| bool gcop::Flat< T, nx, nu, np, nz, _ny >::Control | ( | Vectorcd & | u, |
| const vector< Vectormd > & | ys | ||
| ) | [virtual] |
Construct state from flat outputs
- Parameters:
-
u control ys a vector of y and its derivatives (y,dy,d2y,...)
- Returns:
- true if paramaters are feasible
template<typename T , int nx, int nu, int np, int nz, int _ny>
| bool gcop::Flat< T, nx, nu, np, nz, _ny >::State | ( | T & | x, |
| const vector< Vectoryd > & | ys | ||
| ) | [virtual] |
Construct state from flat outputs
- Parameters:
-
x state ys a vector of y and its derivatives (y,dy,d2y,...)
- Returns:
- true if paramaters are feasible
Member Data Documentation
template<typename T , int nx = Dynamic, int nu = Dynamic, int np = Dynamic, int nz = Dynamic, int _ny = Dynamic>
| int gcop::Flat< T, nx, nu, np, nz, _ny >::ny |
flat output dimension
template<typename T , int nx = Dynamic, int nu = Dynamic, int np = Dynamic, int nz = Dynamic, int _ny = Dynamic>
| int gcop::Flat< T, nx, nu, np, nz, _ny >::ou |
control order
template<typename T , int nx = Dynamic, int nu = Dynamic, int np = Dynamic, int nz = Dynamic, int _ny = Dynamic>
| int gcop::Flat< T, nx, nu, np, nz, _ny >::ox |
state order
template<typename T , int nx = Dynamic, int nu = Dynamic, int np = Dynamic, int nz = Dynamic, int _ny = Dynamic>
| System<T, nx, nu, np, nz>& gcop::Flat< T, nx, nu, np, nz, _ny >::sys |
system
The documentation for this class was generated from the following file:
- lib/systems/flat.h
