#include <kinbody3dcost.h>
Inheritance diagram for gcop::Kinbody3dCost< _nu >:
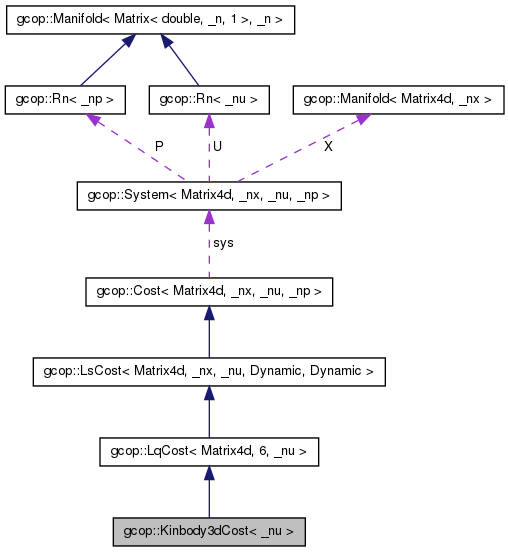
Collaboration diagram for gcop::Kinbody3dCost< _nu >:
Public Member Functions | |
| Kinbody3dCost (Kinbody3d< _nu > &sys, double tf, const Matrix4d &xf, bool diag=true) | |
Public Attributes | |
| Kinbody3dTrack< _nu > * | track |
| double | ko |
template<int _nu = 6>
class gcop::Kinbody3dCost< _nu >
Constructor & Destructor Documentation
template<int _nu>
| gcop::Kinbody3dCost< _nu >::Kinbody3dCost | ( | Kinbody3d< _nu > & | sys, |
| double | tf, | ||
| const Matrix4d & | xf, | ||
| bool | diag = true |
||
| ) |
References gcop::LqCost< Matrix4d, 6, _nu >::Qf, and gcop::LqCost< Matrix4d, 6, _nu >::R.
Member Data Documentation
template<int _nu = 6>
| double gcop::Kinbody3dCost< _nu >::ko |
template<int _nu = 6>
| Kinbody3dTrack<_nu>* gcop::Kinbody3dCost< _nu >::track |
The documentation for this class was generated from the following file:
- lib/systems/costs/kinbody3dcost.h
