|
ASCO Aerial Autonomy
|


All Classes Namespaces Files Functions Variables Typedefs Enumerations Enumerator Friends Macros Pages
|
ASCO Aerial Autonomy
|
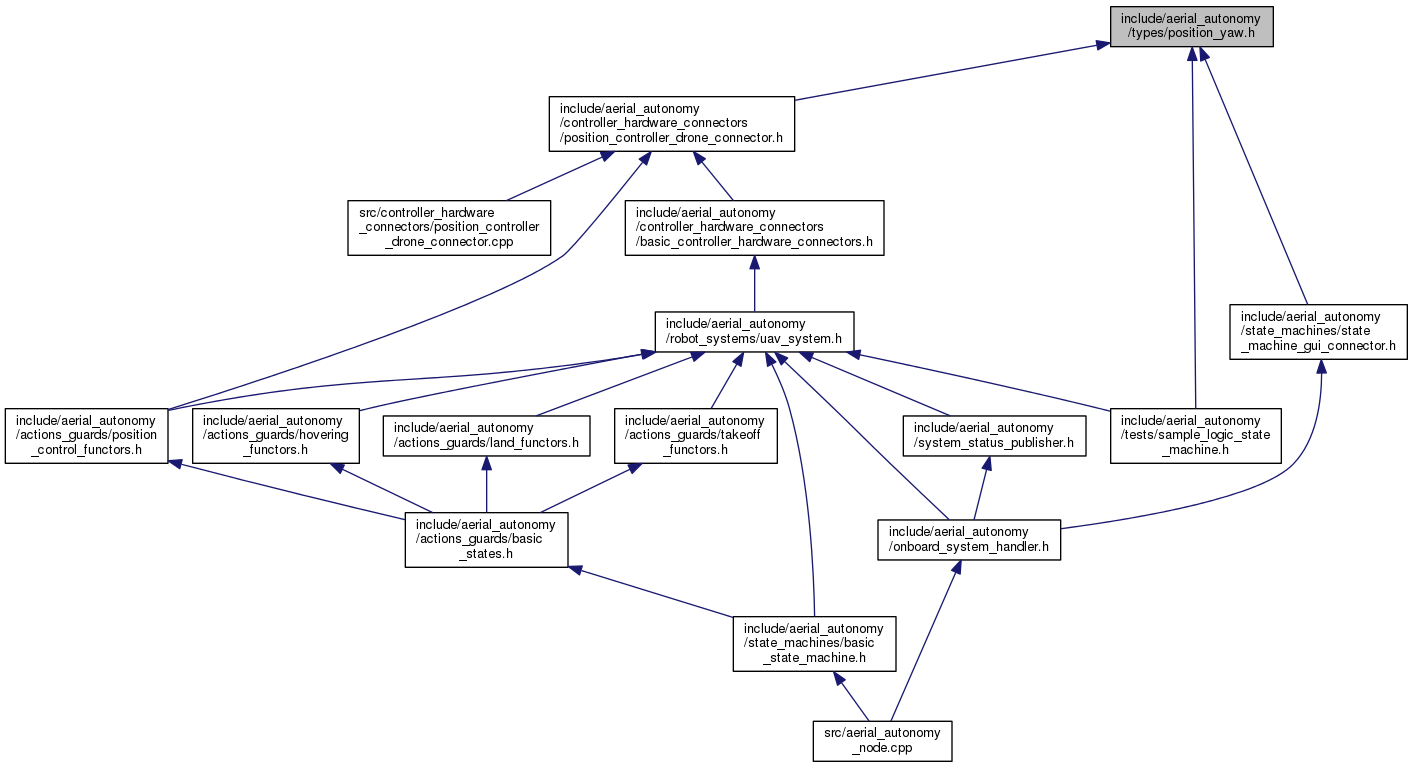
Go to the source code of this file.
Classes | |
| struct | PositionYaw |
| Stores Position, yaw. PositionYaw is used as the goal for UAV systems. More... | |
 1.8.6
1.8.6