|
ASCO Aerial Autonomy
|


All Classes Namespaces Files Functions Variables Typedefs Enumerations Enumerator Friends Macros Pages
|
ASCO Aerial Autonomy
|
#include "aerial_autonomy/common/atomic.h"#include "aerial_autonomy/trackers/base_tracker.h"#include "aerial_autonomy/trackers/simple_tracking_strategy.h"#include "aerial_autonomy/types/position.h"#include <ros/ros.h>#include <cv_bridge/cv_bridge.h>#include <image_transport/image_transport.h>#include <sensor_msgs/CameraInfo.h>#include <sensor_msgs/Image.h>#include <sensor_msgs/RegionOfInterest.h>#include <Eigen/Dense>#include <boost/thread/mutex.hpp>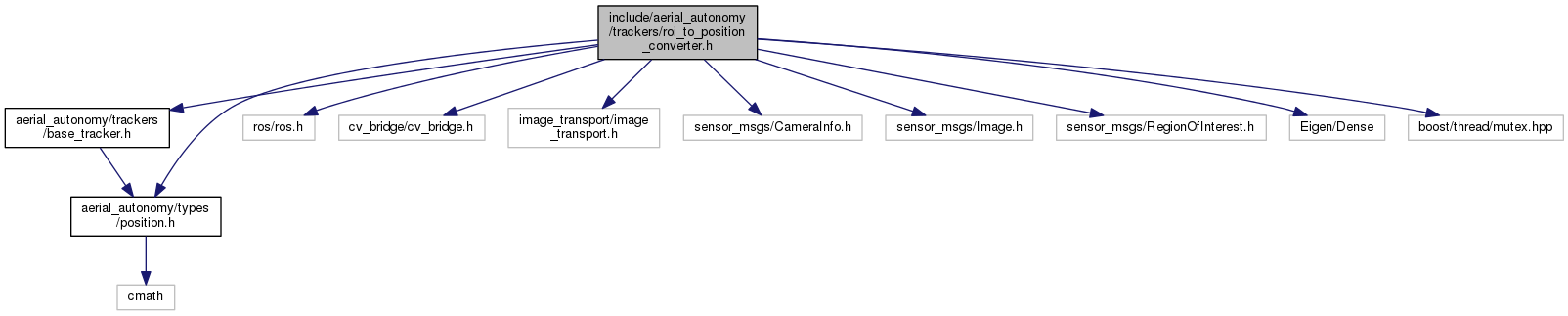
Go to the source code of this file.
Classes | |
| class | RoiToPositionConverter |
| Converts a ROI in image to vector in camera frame. More... | |
 1.8.6
1.8.6