|
ASCO Aerial Autonomy
|


All Classes Namespaces Files Functions Variables Typedefs Enumerations Enumerator Friends Macros Pages
|
ASCO Aerial Autonomy
|
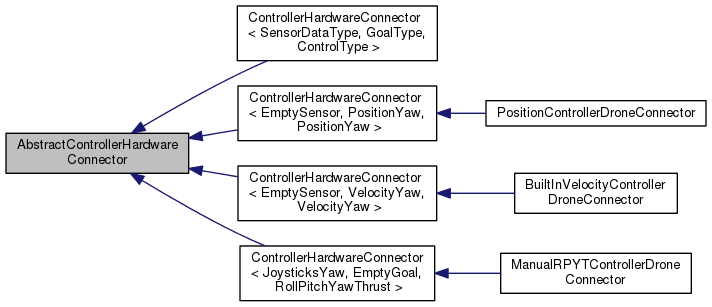
Base for ControllerHardwareConnector class. More...
#include <base_controller_hardware_connector.h>
Public Member Functions | |
| virtual void | run ()=0 |
| Abstract run function. More... | |
| virtual ControllerStatus | getStatus () const =0 |
| Provide the status of the controller. More... | |
| virtual | ~AbstractControllerHardwareConnector () |
| Destructor to get polymorphism. More... | |
Base for ControllerHardwareConnector class.
|
inlinevirtual |
Destructor to get polymorphism.
|
pure virtual |
Provide the status of the controller.
Implemented in ControllerHardwareConnector< SensorDataType, GoalType, ControlType >, ControllerHardwareConnector< std::tuple< tf::Transform, tf::Transform >, tf::Transform, tf::Transform >, ControllerHardwareConnector< JoysticksYaw, EmptyGoal, RollPitchYawThrust >, ControllerHardwareConnector< PositionYaw, PositionYaw, PositionYaw >, ControllerHardwareConnector< PositionYaw, Position, VelocityYawRate >, and ControllerHardwareConnector< VelocityYaw, VelocityYaw, VelocityYaw >.
|
pure virtual |
Abstract run function.
The run function should run controller and send commands to hardware
Implemented in ControllerHardwareConnector< SensorDataType, GoalType, ControlType >, ControllerHardwareConnector< std::tuple< tf::Transform, tf::Transform >, tf::Transform, tf::Transform >, ControllerHardwareConnector< JoysticksYaw, EmptyGoal, RollPitchYawThrust >, ControllerHardwareConnector< PositionYaw, PositionYaw, PositionYaw >, ControllerHardwareConnector< PositionYaw, Position, VelocityYawRate >, and ControllerHardwareConnector< VelocityYaw, VelocityYaw, VelocityYaw >.
 1.8.6
1.8.6