|
ASCO Aerial Autonomy
|


All Classes Namespaces Files Functions Variables Typedefs Enumerations Enumerator Friends Macros Pages
|
ASCO Aerial Autonomy
|
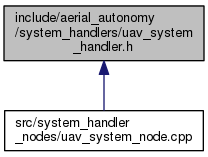
#include <ros/ros.h>#include <parsernode/parser.h>#include <pluginlib/class_loader.h>#include <aerial_autonomy/actions_guards/base_functors.h>#include <aerial_autonomy/robot_systems/uav_system.h>#include <aerial_autonomy/system_handlers/common_system_handler.h>#include "uav_system_handler_config.pb.h"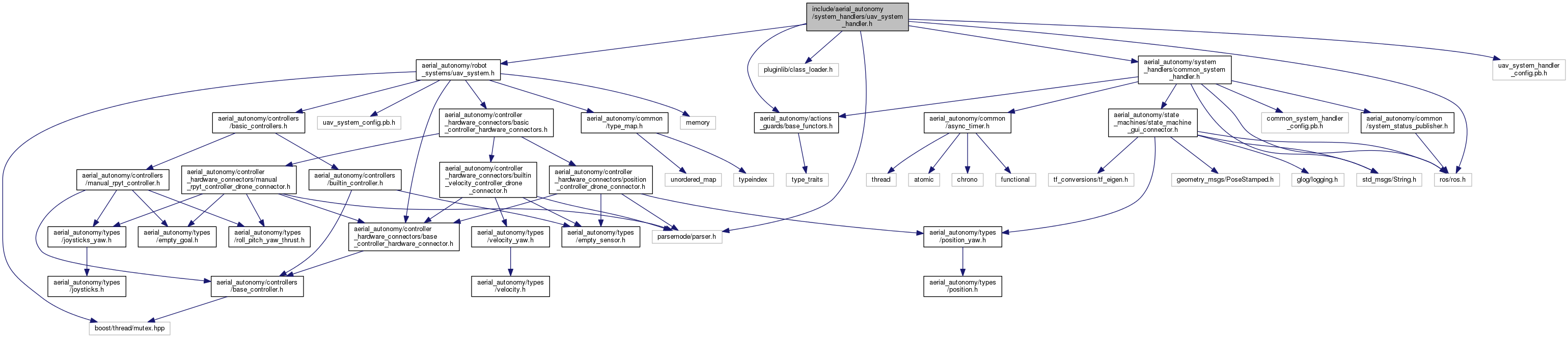
Go to the source code of this file.
Classes | |
| class | UAVSystemHandler< LogicStateMachineT, EventManagerT > |
| Owns all of the autonomous system components and is responsible for thread management. Also owns a common system handler object to handle creation of state machine and connecting it to GUI. More... | |
 1.8.6
1.8.6