|
ASCO Aerial Autonomy
|


All Classes Namespaces Files Functions Variables Typedefs Enumerations Enumerator Friends Macros Pages
|
ASCO Aerial Autonomy
|
#include "aerial_autonomy/controller_hardware_connectors/base_controller_hardware_connector.h"#include "aerial_autonomy/controllers/constant_heading_depth_controller.h"#include "aerial_autonomy/trackers/base_tracker.h"#include "aerial_autonomy/types/position_yaw.h"#include "aerial_autonomy/types/velocity_yaw.h"#include "uav_vision_system_config.pb.h"#include <parsernode/parser.h>#include <tf/tf.h>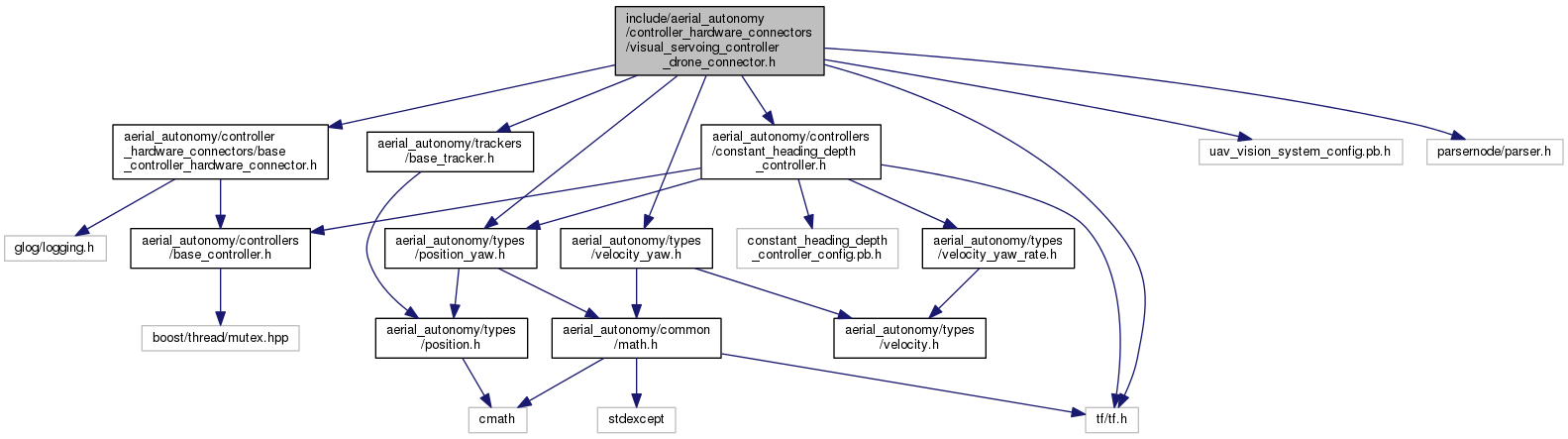
Go to the source code of this file.
Classes | |
| class | VisualServoingControllerDroneConnector |
| A visual servoing controller that uses a tracker output as feedback. More... | |
 1.8.6
1.8.6