|
ASCO Aerial Autonomy
|


All Classes Namespaces Files Functions Variables Typedefs Enumerations Enumerator Friends Macros Pages
|
ASCO Aerial Autonomy
|
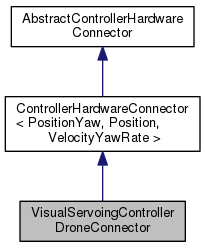
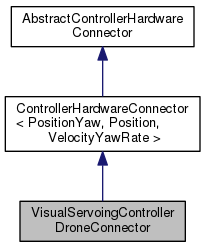
A visual servoing controller that uses a tracker output as feedback. More...
#include <visual_servoing_controller_drone_connector.h>
Public Member Functions | |
| VisualServoingControllerDroneConnector (BaseTracker &tracker, parsernode::Parser &drone_hardware, ConstantHeadingDepthController &controller, tf::Transform camera_transform) | |
| Constructor. More... | |
| virtual | ~VisualServoingControllerDroneConnector () |
| Destructor. More... | |
| bool | getTrackingVectorGlobalFrame (Position &tracking_vector) |
| Get the tracking vector of the RoiToPositionConverter in the global frame. More... | |
 Public Member Functions inherited from ControllerHardwareConnector< PositionYaw, Position, VelocityYawRate > Public Member Functions inherited from ControllerHardwareConnector< PositionYaw, Position, VelocityYawRate > | |
| ControllerHardwareConnector (Controller< PositionYaw, Position, VelocityYawRate > &controller, HardwareType hardware_type) | |
| ControlHardwareConnector runs the controller and sends the commands to hardware. More... | |
| virtual void | run () |
| Extracts sensor data, run controller and send data back to hardware. More... | |
| void | setGoal (Positiongoal) |
| Set the goal for controller. More... | |
| Position | getGoal () const |
| Get the goal for controller. More... | |
| HardwareType | getHardwareType () |
| Return the type of hardware (HardwareType) used by the controller. More... | |
| ControllerStatus | getStatus () const |
| Provide the status of the controller. More... | |
| Public Member Functions inherited from AbstractControllerHardwareConnector | |
| virtual | ~AbstractControllerHardwareConnector () |
| Destructor to get polymorphism. More... | |
Protected Member Functions | |
| virtual bool | extractSensorData (PositionYaw &sensor_data) |
| Extracts pose data from ROI. More... | |
| virtual void | sendHardwareCommands (VelocityYawRate controls) |
| Send velocity commands to hardware. More... | |
Additional Inherited Members | |
| Protected Attributes inherited from ControllerHardwareConnector< PositionYaw, Position, VelocityYawRate > | |
| HardwareType | hardware_type_ |
| Type of hardware controlled by the controller. More... | |
A visual servoing controller that uses a tracker output as feedback.
|
inline |
Constructor.
|
inlinevirtual |
Destructor.
|
protectedvirtual |
Extracts pose data from ROI.
| sensor_data | Position and yaw of object tracked by ROI |
Implements ControllerHardwareConnector< PositionYaw, Position, VelocityYawRate >.
| bool VisualServoingControllerDroneConnector::getTrackingVectorGlobalFrame | ( | Position & | tracking_vector | ) |
Get the tracking vector of the RoiToPositionConverter in the global frame.
| tracking_vector | Returned tracking vector |
|
protectedvirtual |
Send velocity commands to hardware.
| controls | velocity command to send to UAV |
Implements ControllerHardwareConnector< PositionYaw, Position, VelocityYawRate >.
 1.8.6
1.8.6