|
ASCO Aerial Autonomy
|


All Classes Namespaces Files Functions Variables Typedefs Enumerations Enumerator Friends Macros Pages
|
ASCO Aerial Autonomy
|
#include <aerial_autonomy/common/atomic.h>#include <aerial_autonomy/common/controller_status.h>#include <aerial_autonomy/controllers/base_controller.h>#include <glog/logging.h>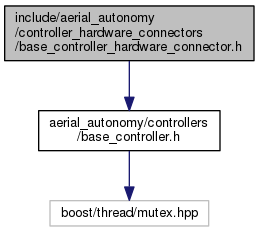
Go to the source code of this file.
Classes | |
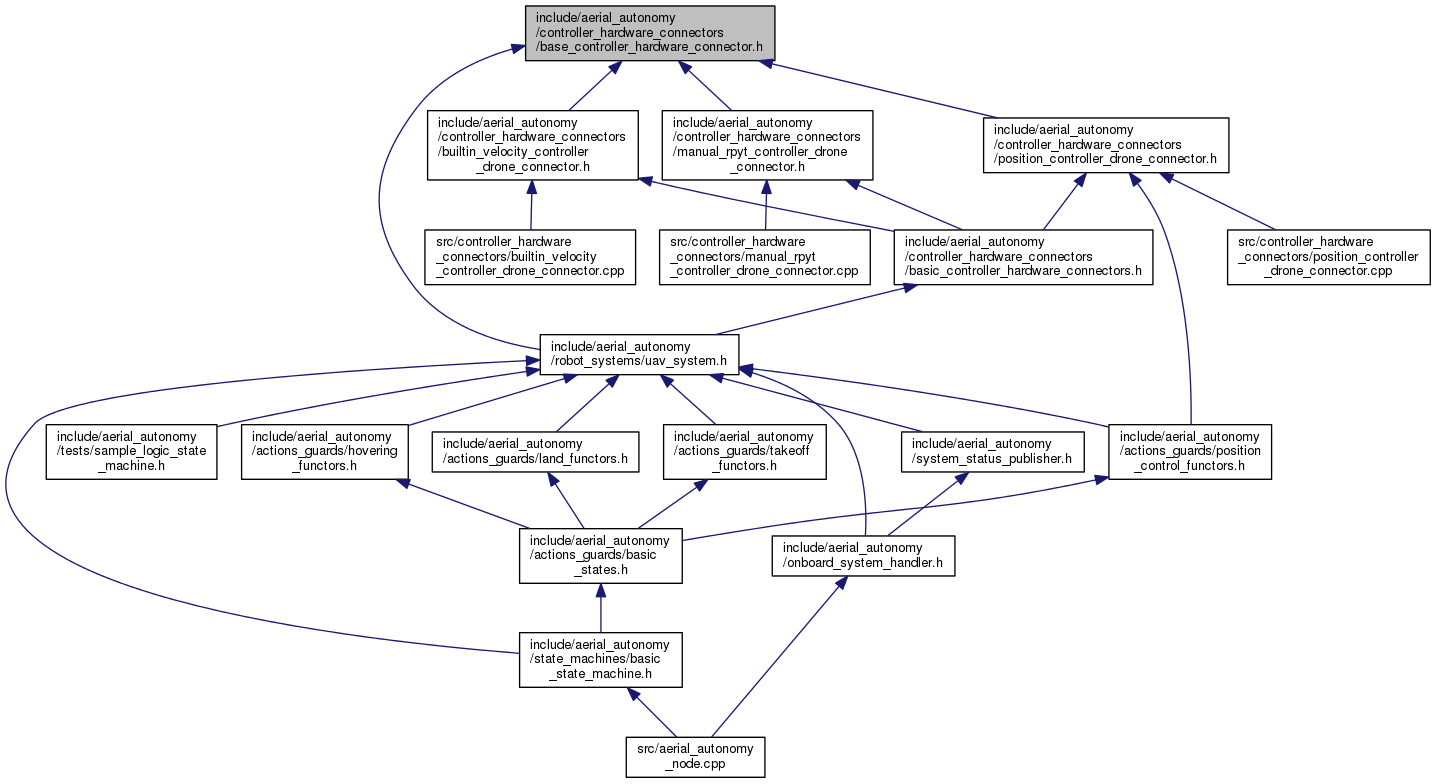
| struct | AbstractControllerHardwareConnector |
| Base for ControllerHardwareConnector class. More... | |
| class | ControllerHardwareConnector< SensorDataType, GoalType, ControlType > |
| Performs a single step of extracting data, running controller and sending data back to hardware. More... | |
Enumerations | |
| enum | HardwareType { HardwareType::UAV, HardwareType::Arm, HardwareType::First = UAV, HardwareType::Last = Arm } |
| Type of hardware used by ControllerHardwareConnector. Enum ID must be contiguous. More... | |
|
strong |
Type of hardware used by ControllerHardwareConnector. Enum ID must be contiguous.
| Enumerator | |
|---|---|
| UAV |
Only aerial vehicle. |
| Arm |
Only arm. |
| First | |
| Last | |
 1.8.6
1.8.6