#include <flatoutputtparam.h>
Public Member Functions | |
| FlatOutputTparam (System< T, nx, nu, np > &sys, int ny_, int numberofknots_, int numberofderivatives_=0, bool fixfinal_=false) | |
| bool | To (Vectorntpd &s, const vector< double > &ts, const vector< T > &xs, const vector< Vectorcd > &us, const Vectormd *p=0) |
| bool | From (vector< double > &ts, vector< T > &xs, vector< Vectorcd > &us, const Vectorntpd &s, Vectormd *p=0) |
Public Attributes | |
| int | numberofderivatives |
| Number of derivatives of flat outputs needed. | |
| int | numberofknots |
| Number of knots for bezier curve. | |
| int | ny |
| Number of flat outputs. | |
| vector< vector< VectorXd > > | knotsforallderivatives |
| Knots for each derivative are computed on the fly. | |
| bool | fixfinal |
| should the final flat output be fixed (with necessary flatoutput time derivatives == 0) | |
Protected Member Functions | |
| VectorXd | DeCasteljau (vector< VectorXd > &s, double u, int start, int end) |
| void | Createknotsforallderivatives (const Vectorntpd &s) |
Detailed Description
template<typename T, int nx, int nu, int np = Dynamic, int _ntp = Dynamic>
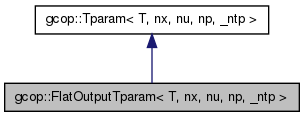
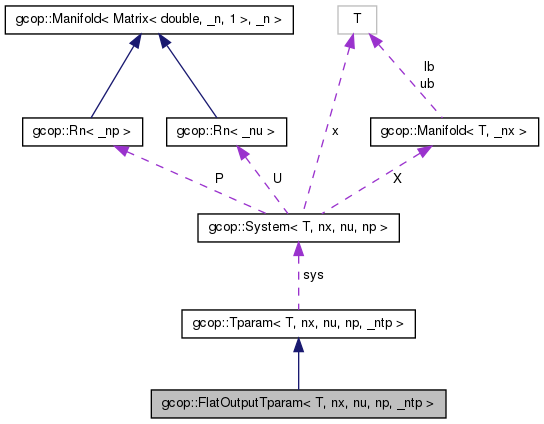
class gcop::FlatOutputTparam< T, nx, nu, np, _ntp >
This is a flat output parametrization class. The template vector ny gives the size of flat output TODO If ny Dynamic somehow resize all the knotvector sizes
Author: Marin Kobilarov (c) 2005--2013 Author2: Gowtham Garimella
Constructor & Destructor Documentation
| gcop::FlatOutputTparam< T, nx, nu, np, _ntp >::FlatOutputTparam | ( | System< T, nx, nu, np > & | sys, |
| int | ny_, | ||
| int | numberofknots_, | ||
| int | numberofderivatives_ = 0, |
||
| bool | fixfinal_ = false |
||
| ) |
Constructor
- Parameters:
-
sys System used for manifold numberofknots The number of knots used for bezier curve. This also determines the degree of the curve numberofderivatives_ The number of derivatives needed by the system for evaluating flat outputs
References gcop::FlatOutputTparam< T, nx, nu, np, _ntp >::knotsforallderivatives, gcop::FlatOutputTparam< T, nx, nu, np, _ntp >::numberofderivatives, gcop::FlatOutputTparam< T, nx, nu, np, _ntp >::numberofknots, and gcop::FlatOutputTparam< T, nx, nu, np, _ntp >::ny.
Member Function Documentation
| void gcop::FlatOutputTparam< T, nx, nu, np, _ntp >::Createknotsforallderivatives | ( | const Vectorntpd & | s | ) | [inline, protected] |
This function evaluates all the knots Dk_i for all the derivatives needed This is dont recursively as noted in http://www.cs.mtu.edu/~shene/COURSES/cs3621/NOTES/spline/Bezier/bezier-der.html
- Parameters:
-
s The input knots
| VectorXd gcop::FlatOutputTparam< T, nx, nu, np, _ntp >::DeCasteljau | ( | vector< VectorXd > & | s, |
| double | u, | ||
| int | start, | ||
| int | end | ||
| ) | [inline, protected] |
Evaluate Bezier curve using knots in s using DeCasteljau algorithm
- Parameters:
-
u input point where bezier curve is evaluated (0,1) start Starting point for recursionP_0 end ending point for recursion P_n
| bool gcop::FlatOutputTparam< T, nx, nu, np, _ntp >::From | ( | vector< double > & | ts, |
| vector< T > & | xs, | ||
| vector< Vectorcd > & | us, | ||
| const Vectorntpd & | s, | ||
| Vectormd * | p = 0 |
||
| ) | [virtual] |
Convert from trajectory (ts,xs,us,p) to parameters s
- Parameters:
-
ts times xs states us controls s trajectory parametrization vector p system parameters (optional)
- Returns:
- true if conversion was successful
Reimplemented from gcop::Tparam< T, nx, nu, np, _ntp >.
| bool gcop::FlatOutputTparam< T, nx, nu, np, _ntp >::To | ( | Vectorntpd & | s, |
| const vector< double > & | ts, | ||
| const vector< T > & | xs, | ||
| const vector< Vectorcd > & | us, | ||
| const Vectormd * | p = 0 |
||
| ) | [virtual] |
Convert from paramer s to trajectory (ts,xs,us,p)
- Parameters:
-
s trajectory parametrization vector ts times xs states us controls p system parameters (optional)
- Returns:
- true if conversion was successful
Reimplemented from gcop::Tparam< T, nx, nu, np, _ntp >.
Member Data Documentation
| bool gcop::FlatOutputTparam< T, nx, nu, np, _ntp >::fixfinal |
should the final flat output be fixed (with necessary flatoutput time derivatives == 0)
| vector<vector<VectorXd> > gcop::FlatOutputTparam< T, nx, nu, np, _ntp >::knotsforallderivatives |
Knots for each derivative are computed on the fly.
Referenced by gcop::FlatOutputTparam< T, nx, nu, np, _ntp >::FlatOutputTparam().
| int gcop::FlatOutputTparam< T, nx, nu, np, _ntp >::numberofderivatives |
Number of derivatives of flat outputs needed.
Referenced by gcop::FlatOutputTparam< T, nx, nu, np, _ntp >::FlatOutputTparam().
| int gcop::FlatOutputTparam< T, nx, nu, np, _ntp >::numberofknots |
Number of knots for bezier curve.
Referenced by gcop::FlatOutputTparam< T, nx, nu, np, _ntp >::FlatOutputTparam().
| int gcop::FlatOutputTparam< T, nx, nu, np, _ntp >::ny |
Number of flat outputs.
Referenced by gcop::FlatOutputTparam< T, nx, nu, np, _ntp >::FlatOutputTparam().
The documentation for this class was generated from the following file:
- lib/systems/parametrization/flatoutputtparam.h
