#include <gndoepv2.h>
Public Member Functions | |
| GnDoep1 (System< T, _nx, _nu, _np > &sys, Sensor< T1, _nx1, _nu, _np, Tz, _nz > &sensor, LqSensorCost< T, _nx, _nu, _np, _ng, Tz, _nz > &cost, vector< double > &ts, vector< T > &xs, vector< Vectorcd > &us, Vectormd &p, vector< double > &ts1, Func_type _project=NULL, bool update=true) | |
| virtual | ~GnDoep1 () |
| void | Iterate () |
Public Attributes | |
| int | info |
| double | fnorm |
| double | covfac |
| int | inputs |
| int | values |
| VectorXd | s |
| optimization vector | |
| GnCost< T, _nx, _nu, _np, _ng, Tz, _nz, T1, _nx1 > * | functor |
| NumericalDiff< GnCost< T, _nx, _nu, _np, _ng, Tz, _nz, T1, _nx1 > > * | numDiff |
| LevenbergMarquardt < NumericalDiff< GnCost< T, _nx, _nu, _np, _ng, Tz, _nz, T1, _nx1 > > > * | lm |
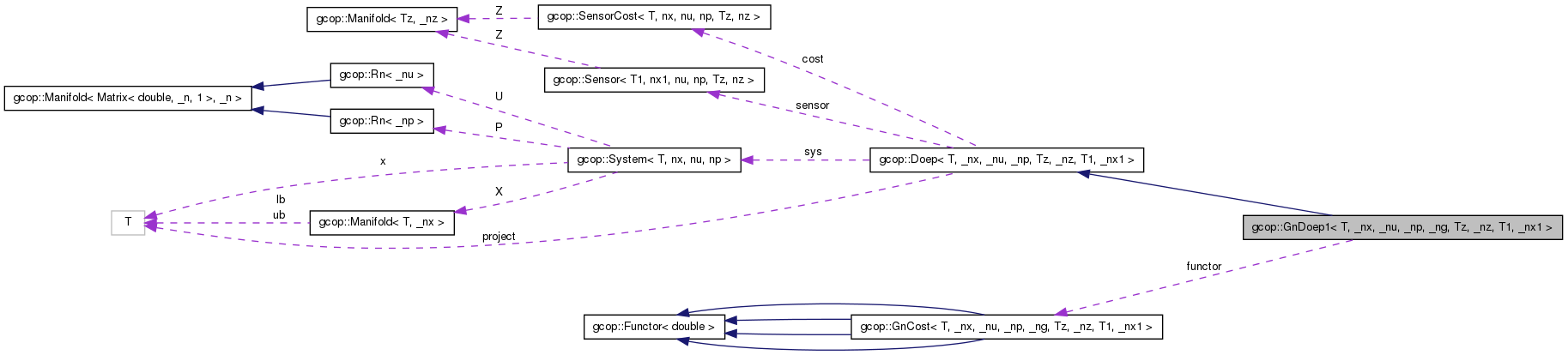
template<typename T = VectorXd, int _nx = Dynamic, int _nu = Dynamic, int _np = Dynamic, int _ng = Dynamic, typename Tz = VectorXd, int _nz = Dynamic, typename T1 = T, int _nx1 = _nx>
class gcop::GnDoep1< T, _nx, _nu, _np, _ng, Tz, _nz, T1, _nx1 >
Constructor & Destructor Documentation
| gcop::GnDoep1< T, _nx, _nu, _np, _ng, Tz, _nz, T1, _nx1 >::GnDoep1 | ( | System< T, _nx, _nu, _np > & | sys, |
| Sensor< T1, _nx1, _nu, _np, Tz, _nz > & | sensor, | ||
| LqSensorCost< T, _nx, _nu, _np, _ng, Tz, _nz > & | cost, | ||
| vector< double > & | ts, | ||
| vector< T > & | xs, | ||
| vector< Vectorcd > & | us, | ||
| Vectormd & | p, | ||
| vector< double > & | ts1, | ||
| Func_type | _project = NULL, |
||
| bool | update = true |
||
| ) |
Create an optimal estimation problem using a system, sensor, a cost, and sensor measurements and parameters of the system.
The optimal estimation is done over selecting the right parameters for the system and also process noise to ensure the estimation cost on sensor measurements and noise is minimized Parameters can also have a prior which is added into the cost function. The parameters passed in here are used as initial guess to the system
You should set the ts[1:N+1], xs[0]; Known controls us
After initialization, every call to Iterate() will optimize the parameters of the system, process noise and modify them accordingly.
- Parameters:
-
sys system cost cost tparam trajectory parametrization ts (N+1) sequence of discrete times xs (N+1) sequence of discrete states us (N) sequence of control inputs p static parameter vector initial guess of it ng _project Optional function to project T into T1. Not needed if T == T1 update whether to update trajectory xs using initial state xs[0] and inputs us. This is necessary only if xs was not already generated from us.
References gcop::GnDoep1< T, _nx, _nu, _np, _ng, Tz, _nz, T1, _nx1 >::inputs, gcop::Doep< T, _nx, _nu, _np, Tz, _nz, T1, _nx1 >::Update(), and gcop::GnDoep1< T, _nx, _nu, _np, _ng, Tz, _nz, T1, _nx1 >::values.
| gcop::GnDoep1< T, _nx, _nu, _np, _ng, Tz, _nz, T1, _nx1 >::~GnDoep1 | ( | ) | [virtual] |
Member Function Documentation
| void gcop::GnDoep1< T, _nx, _nu, _np, _ng, Tz, _nz, T1, _nx1 >::Iterate | ( | ) | [virtual] |
Perform one DOCP iteration. Internally calls: are updated.
Reimplemented from gcop::Doep< T, _nx, _nu, _np, Tz, _nz, T1, _nx1 >.
References gcop::GnCost< T, _nx, _nu, _np, _ng, _ntp >::doep, and np.
Member Data Documentation
| double gcop::GnDoep1< T, _nx, _nu, _np, _ng, Tz, _nz, T1, _nx1 >::covfac |
| double gcop::GnDoep1< T, _nx, _nu, _np, _ng, Tz, _nz, T1, _nx1 >::fnorm |
| GnCost<T, _nx, _nu, _np, _ng, Tz, _nz, T1, _nx1>* gcop::GnDoep1< T, _nx, _nu, _np, _ng, Tz, _nz, T1, _nx1 >::functor |
| int gcop::GnDoep1< T, _nx, _nu, _np, _ng, Tz, _nz, T1, _nx1 >::info |
| int gcop::GnDoep1< T, _nx, _nu, _np, _ng, Tz, _nz, T1, _nx1 >::inputs |
| LevenbergMarquardt<NumericalDiff<GnCost<T, _nx, _nu, _np, _ng, Tz, _nz, T1, _nx1> > >* gcop::GnDoep1< T, _nx, _nu, _np, _ng, Tz, _nz, T1, _nx1 >::lm |
| NumericalDiff<GnCost<T, _nx, _nu, _np, _ng, Tz, _nz, T1, _nx1> >* gcop::GnDoep1< T, _nx, _nu, _np, _ng, Tz, _nz, T1, _nx1 >::numDiff |
| VectorXd gcop::GnDoep1< T, _nx, _nu, _np, _ng, Tz, _nz, T1, _nx1 >::s |
optimization vector
| int gcop::GnDoep1< T, _nx, _nu, _np, _ng, Tz, _nz, T1, _nx1 >::values |
The documentation for this class was generated from the following file:
- lib/algos/gndoepv2.h
