|
ASCO Aerial Autonomy
|


All Classes Namespaces Files Functions Variables Typedefs Enumerations Enumerator Friends Macros Pages
|
ASCO Aerial Autonomy
|
#include <aerial_autonomy/actions_guards/arm_functors.h>#include <aerial_autonomy/actions_guards/pick_place_functors.h>#include <aerial_autonomy/actions_guards/visual_servoing_states_actions.h>#include <aerial_autonomy/arm_events.h>#include <boost/msm/front/euml/operator.hpp>#include <boost/msm/front/functor_row.hpp>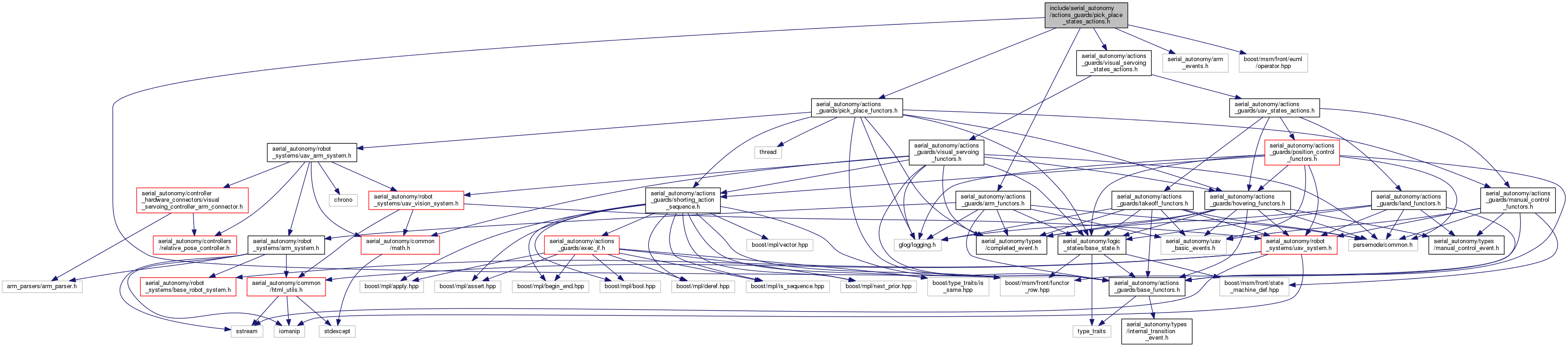
Go to the source code of this file.
Classes | |
| struct | PickPlaceStatesActions< LogicStateMachineT > |
| Class to provide typedefs for all basic uav states and actions. More... | |
| struct | PickPlaceStatesActions< LogicStateMachineT >::ManualControlArmState |
| State that checks arm status along with regular manual control state. More... | |
| struct | PickPlaceStatesActions< LogicStateMachineT >::ManualControlArmState::internal_transition_table |
 1.8.6
1.8.6