|
ASCO Aerial Autonomy
|


All Classes Namespaces Files Functions Variables Typedefs Enumerations Enumerator Friends Macros Pages
|
ASCO Aerial Autonomy
|
#include <aerial_autonomy/robot_systems/uav_arm_system.h>#include <aerial_autonomy/robot_systems/uav_system.h>#include <aerial_autonomy/robot_systems/uav_vision_system.h>#include <aerial_autonomy/state_machines/base_state_machine.h>#include <aerial_autonomy/types/position_yaw.h>#include <type_traits>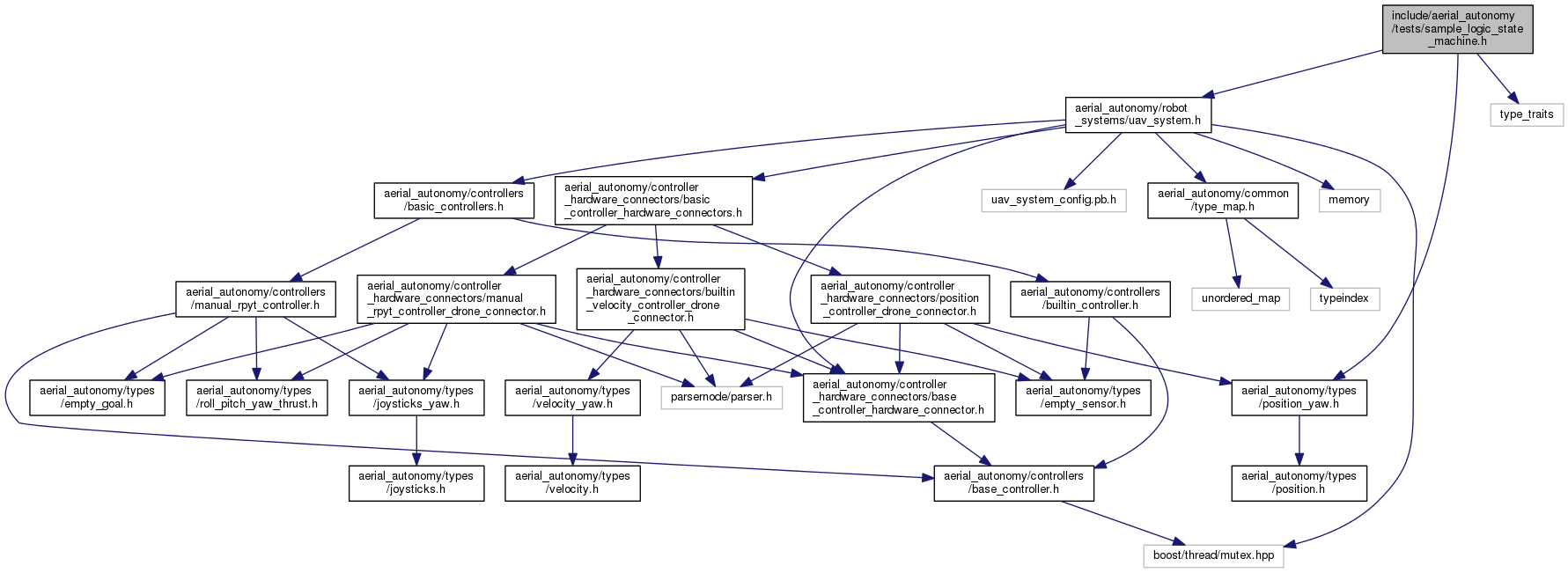
Go to the source code of this file.
Classes | |
| struct | EmptyRobotSystem |
| Robot system that does not perform any actions. More... | |
| class | SampleLogicStateMachine_< RobotSystemT > |
| Example Logic state machine that stores triggered event. More... | |
Typedefs | |
| using | SampleLogicStateMachine = SampleLogicStateMachine_< EmptyRobotSystem > |
| Sample logic state machine templated on empty robot system. More... | |
| using | UAVLogicStateMachine = SampleLogicStateMachine_< UAVSystem > |
| Sample logic state machine templated on UAV system. More... | |
| using | UAVVisionLogicStateMachine = SampleLogicStateMachine_< UAVVisionSystem > |
| Sample logic state machine templated on UAV system. More... | |
| using | UAVArmLogicStateMachine = SampleLogicStateMachine_< UAVArmSystem > |
| Sample logic state machine templated on UAV arm system. More... | |
Sample logic state machine templated on empty robot system.
Sample logic state machine templated on UAV arm system.
Sample logic state machine templated on UAV system.
Sample logic state machine templated on UAV system.
 1.8.6
1.8.6