|
ASCO Aerial Autonomy
|


All Classes Namespaces Files Functions Variables Typedefs Enumerations Enumerator Friends Macros Pages
|
ASCO Aerial Autonomy
|
front-end: define the FSM structure More...
#include <uav_state_machine.h>
Classes | |
| struct | transition_table |
| Transition table for State Machine. More... | |
Public Types | |
| using | initial_state = usa::ManualControlState |
| Initial state for state machine. More... | |
Public Member Functions | |
| template<class Event , class FSM > | |
| void | on_entry (Event const &, FSM &) |
| Action to take on entering state machine. More... | |
| template<class Event , class FSM > | |
| void | on_exit (Event const &, FSM &) |
| Action to take on leaving state machine. More... | |
| UAVStateMachineFrontEnd (UAVSystem &uav_system) | |
| Constructor with arguments to store robot system. More... | |
 Public Member Functions inherited from BaseStateMachine< UAVSystem > Public Member Functions inherited from BaseStateMachine< UAVSystem > | |
| std::type_index | get_no_transition_event_index () const |
| Returns the index of the event that did not trigger any transition. More... | |
| BaseStateMachine (UAVSystem &robot_system) | |
| Constructor with arguments to store robot system. More... | |
| void | no_transition (Event const &e, FSM &, int state_index) |
| Print event typeid if no action present for the corresponding event. More... | |
Additional Inherited Members | |
| Public Attributes inherited from BaseStateMachine< UAVSystem > | |
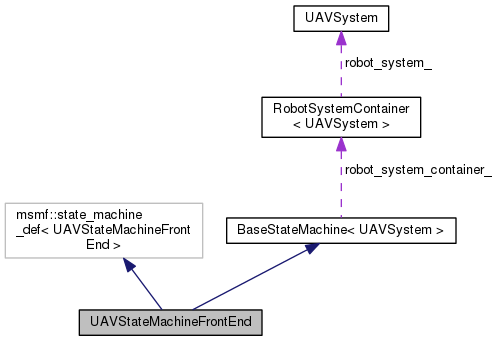
| RobotSystemContainer< UAVSystem > | robot_system_container_ |
| robot system container used by states to get sensor data and send commands Use the operator function robot_system_container_() to retrieve robot system in Action, Guard Functors. Other classes cannot access the robot system More... | |
| Protected Attributes inherited from BaseStateMachine< UAVSystem > | |
| std::type_index | no_transition_event_index_ |
| type index to store the event that did not trigger any transition More... | |
front-end: define the FSM structure
Initial state for state machine.
|
inline |
Constructor with arguments to store robot system.
| uav_system | robot system that is stored internally and shared with events |
|
inline |
Action to take on entering state machine.
| Event | type of event causing state machine to enter |
| FSM | Backend finite state machine type to trigger events |
|
inline |
Action to take on leaving state machine.
| Event | type of event causing state machine to enter |
| FSM | Backend finite state machine type to trigger events |
 1.8.6
1.8.6