|
ASCO Aerial Autonomy
|


All Classes Namespaces Files Functions Variables Typedefs Enumerations Enumerator Friends Macros Pages
|
ASCO Aerial Autonomy
|
#include <aerial_autonomy/robot_systems/uav_system.h>#include <aerial_autonomy/types/manual_control_event.h>#include <aerial_autonomy/uav_basic_events.h>#include <boost/msm/front/functor_row.hpp>#include <boost/msm/front/state_machine_def.hpp>#include <parsernode/common.h>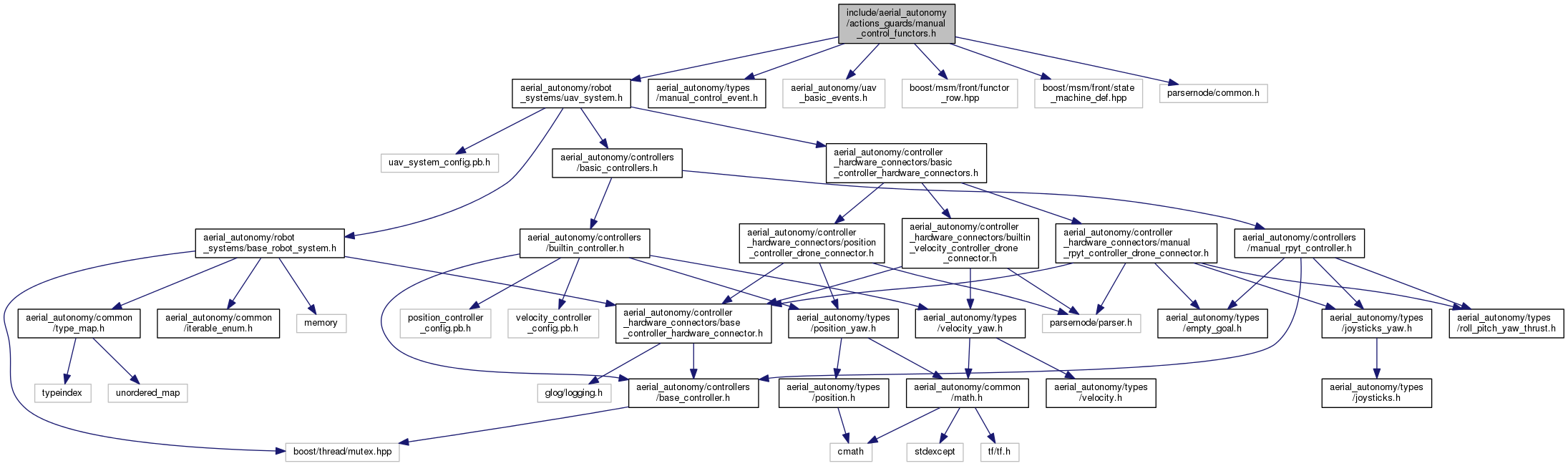
Go to the source code of this file.
Classes | |
| struct | ManualControlSwitchAction_< LogicStateMachineT > |
| Basic events such as takeoff land etc. More... | |
| struct | ManualControlSwitchGuard_< LogicStateMachineT > |
| Guard to avoid switching to SDK mode unless hardware allows it. More... | |
| struct | ManualControlInternalActionFunctor_< LogicStateMachineT > |
| Check if hardware is allowing to switch sdk mode. More... | |
Typedefs | |
| template<class LogicStateMachineT > | |
| using | ManualControlState_ = BaseState< UAVSystem, LogicStateMachineT, ManualControlInternalActionFunctor_< LogicStateMachineT >> |
| State that uses internal action for switching out of sdk mode. More... | |
| using ManualControlState_ = BaseState<UAVSystem, LogicStateMachineT, ManualControlInternalActionFunctor_<LogicStateMachineT>> |
State that uses internal action for switching out of sdk mode.
| LogicStateMachineT | Logic state machine used to process events |
 1.8.6
1.8.6