|
ASCO Aerial Autonomy
|


All Classes Namespaces Files Functions Variables Typedefs Enumerations Enumerator Friends Macros Pages
|
ASCO Aerial Autonomy
|
#include <aerial_autonomy/common/thread_safe_state_machine.h>#include <boost/msm/front/state_machine_def.hpp>#include <boost/msm/front/functor_row.hpp>#include <aerial_autonomy/actions_guards/uav_states_actions.h>#include <aerial_autonomy/robot_systems/uav_system.h>#include <glog/logging.h>#include <array>#include <aerial_autonomy/state_machines/base_state_machine.h>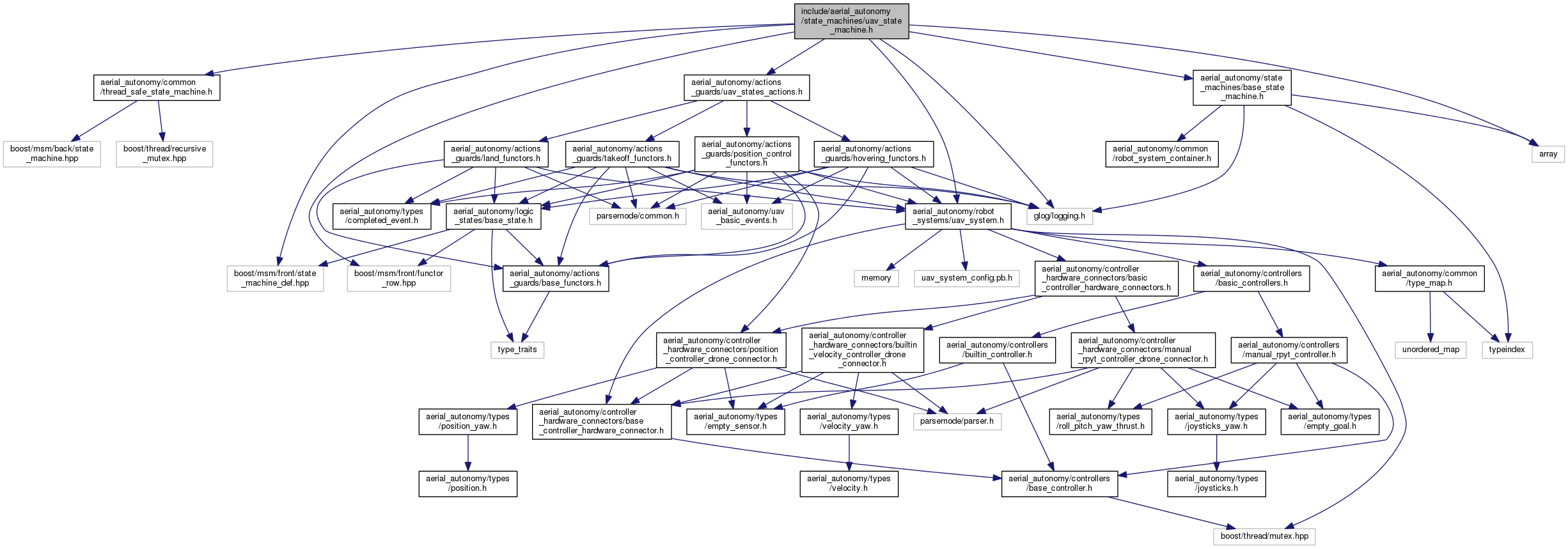
Go to the source code of this file.
Classes | |
| class | UAVStateMachineFrontEnd |
| front-end: define the FSM structure More... | |
| struct | UAVStateMachineFrontEnd::transition_table |
| Transition table for State Machine. More... | |
Typedefs | |
| using | UAVStateMachine = boost::msm::back::thread_safe_state_machine< UAVStateMachineFrontEnd > |
| Backend for Logic State Machine. More... | |
| using | usa = UAVStatesActions< UAVStateMachine > |
| Namespace for basic uav states and actions such as takeoff, land etc. More... | |
Functions | |
| const char * | pstate (UAVStateMachine const &p) |
| Get current state name. More... | |
Backend for Logic State Machine.
Used to forward arguments to constructor, and process events
| using usa = UAVStatesActions<UAVStateMachine> |
Namespace for basic uav states and actions such as takeoff, land etc.
| const char* pstate | ( | UAVStateMachine const & | p | ) |
Get current state name.
| p | Logic state machine backend to access current state |
 1.8.6
1.8.6