|
ASCO Aerial Autonomy
|


All Classes Namespaces Files Functions Variables Typedefs Enumerations Enumerator Friends Macros Pages
|
ASCO Aerial Autonomy
|
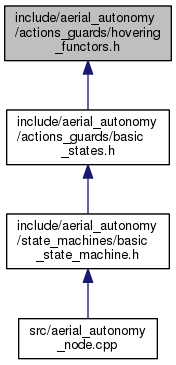
#include <aerial_autonomy/actions_guards/base_functors.h>#include <aerial_autonomy/logic_states/base_state.h>#include <aerial_autonomy/robot_systems/uav_system.h>#include <aerial_autonomy/types/completed_event.h>#include <aerial_autonomy/types/manual_control_event.h>#include <aerial_autonomy/uav_basic_events.h>#include <glog/logging.h>#include <parsernode/common.h>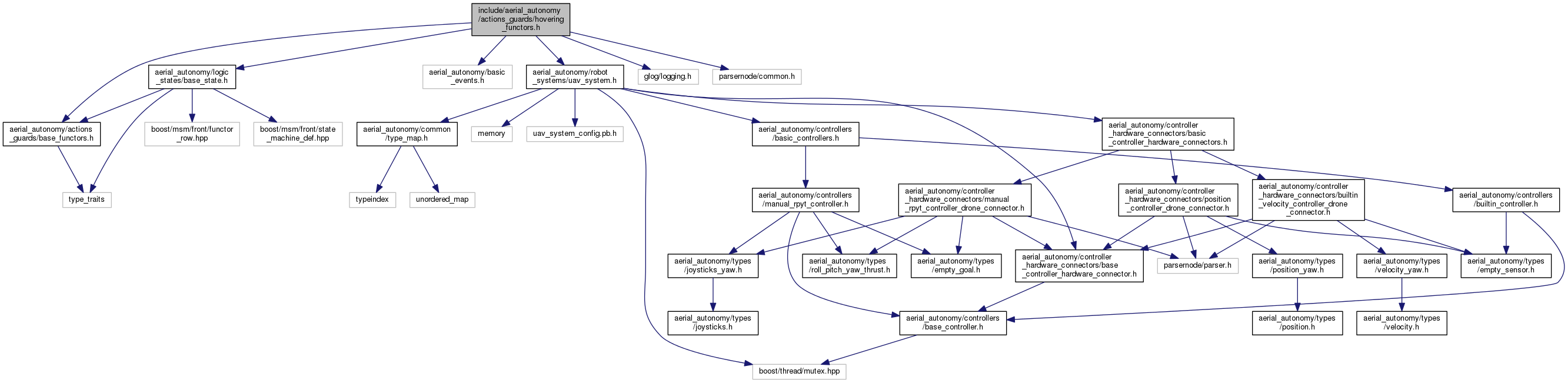
Go to the source code of this file.
Classes | |
| struct | HoveringInternalActionFunctor_< LogicStateMachineT, AbortEventT > |
| Internal action when hovering. More... | |
| struct | ControllerStatusInternalActionFunctor_< LogicStateMachineT, ControllerConnector, check_completed > |
| Logic to abort if controller status is critical. More... | |
Typedefs | |
| template<class LogicStateMachineT > | |
| using | UAVStatusInternalActionFunctor_ = HoveringInternalActionFunctor_< LogicStateMachineT, be::Abort > |
| Create a action functor that checks the UAV status and aborts if UAV is in manual control mode. More... | |
| template<class LogicStateMachineT > | |
| using | Hovering_ = BaseState< UAVSystem, LogicStateMachineT, HoveringInternalActionFunctor_< LogicStateMachineT >> |
| Hovering state that uses internal action. More... | |
| using Hovering_ = BaseState<UAVSystem, LogicStateMachineT, HoveringInternalActionFunctor_<LogicStateMachineT>> |
Hovering state that uses internal action.
| LogicStateMachineT | Logic state machine used to process events |
| using UAVStatusInternalActionFunctor_ = HoveringInternalActionFunctor_<LogicStateMachineT, be::Abort> |
Create a action functor that checks the UAV status and aborts if UAV is in manual control mode.
| LogicStateMachineT |
 1.8.6
1.8.6