#include <view.h>
Public Member Functions | |
| View (const char *name=0) | |
| virtual | ~View () |
| virtual void | Render () |
| virtual bool | RenderFrame (int i=0) |
| void | Lock () |
| void | Unlock () |
Protected Attributes | |
| char | name [256] |
| name | |
| int | id |
| id | |
| pthread_mutex_t | mut |
| synchronization | |
Friends | |
| class | Viewer |
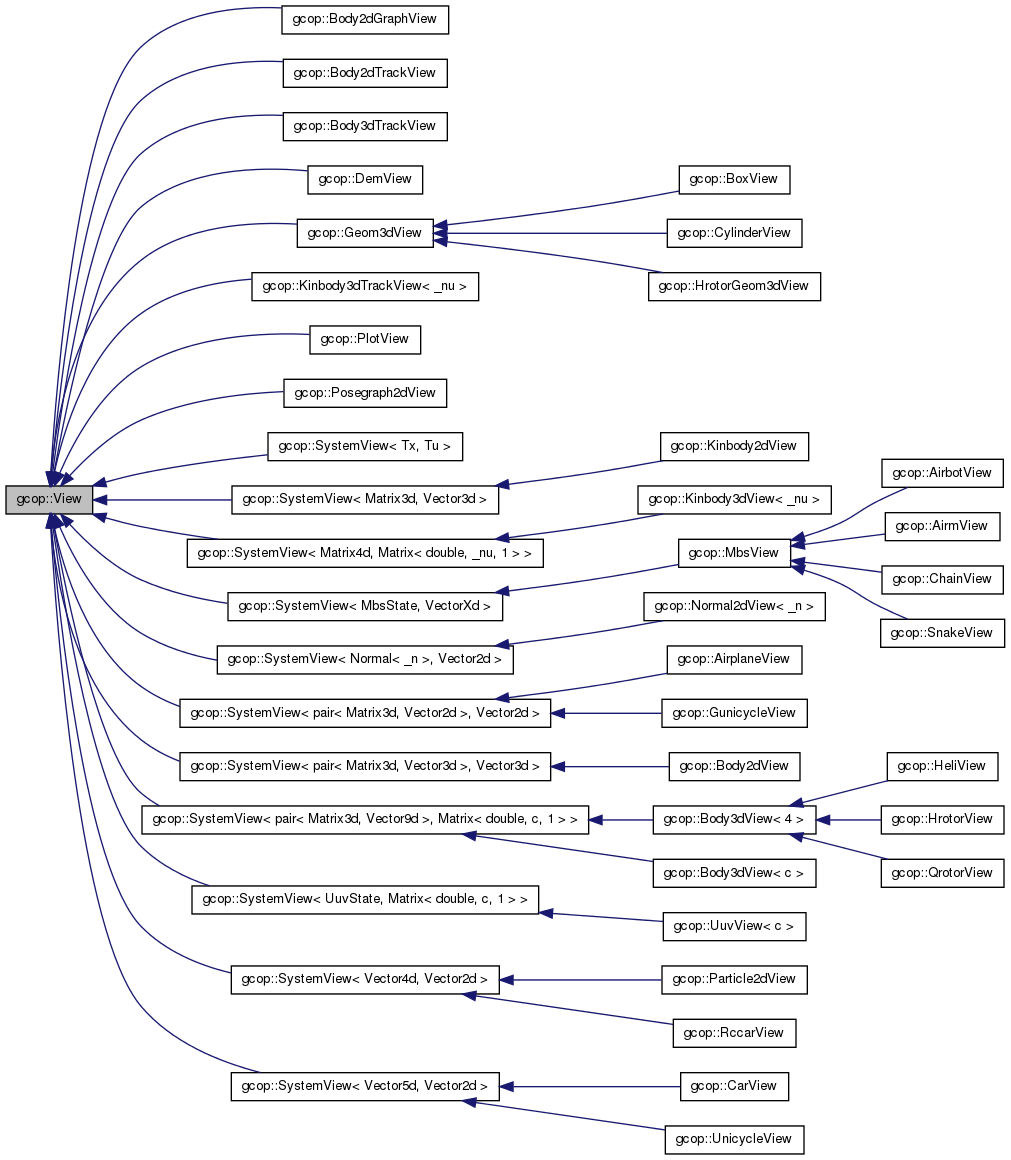
Detailed Description
Basic view class that all views should subclass. Render() should provide the rendering. Lock() and Unlock() should be used when any data used in Render() is being updated.
Author: Marin Kobilarov -- Copyright (C) 2005
Constructor & Destructor Documentation
| View::View | ( | const char * | name = 0 | ) |
| View::~View | ( | ) | [virtual] |
Destroy view
References mut.
Member Function Documentation
| void View::Lock | ( | ) |
Lock a view. This is done when updating data inside this object. While a view is locked Render() is not called
References mut.
Referenced by gcop::Viewer::RenderViews().
| void View::Render | ( | ) | [virtual] |
Render a view: all subclasses should provide this method
Reimplemented in gcop::SystemView< Tx, Tu >, gcop::SystemView< T, Vectorcd >, gcop::SystemView< Matrix3d, Vector3d >, gcop::SystemView< Vector5d, Vector2d >, gcop::SystemView< Point3dState, Vector3d >, gcop::SystemView< Matrix4d, Matrix< double, _nu, 1 > >, gcop::SystemView< Normal< _n >, Vector2d >, gcop::SystemView< UuvState, Matrix< double, c, 1 > >, gcop::SystemView< pair< Matrix3d, Vector9d >, Matrix< double, c, 1 > >, gcop::SystemView< MbsState, VectorXd >, gcop::SystemView< Body2dState, Matrix< double, c, 1 > >, gcop::SystemView< pair< Matrix3d, Vector2d >, Vector2d >, gcop::SystemView< Vector4d, Vector2d >, gcop::SystemCeView< T, n, c, np, ntp >, gcop::Kinbody3dTrackView< _nu >, gcop::PlotView, gcop::Body2dTrackView, gcop::Body3dTrackView, gcop::Body2dGraphView, gcop::Posegraph2dView, and gcop::DemView.
References RenderFrame().
Referenced by gcop::Viewer::RenderViews().
| bool View::RenderFrame | ( | int | i = 0 | ) | [virtual] |
Render a view: all subclasses should provide this method
- Parameters:
-
i frame #
- Returns:
- return true if more frames should be rendered
Reimplemented in gcop::SystemView< Tx, Tu >, gcop::SystemView< T, Vectorcd >, gcop::SystemView< Matrix3d, Vector3d >, gcop::SystemView< Vector5d, Vector2d >, gcop::SystemView< Point3dState, Vector3d >, gcop::SystemView< Matrix4d, Matrix< double, _nu, 1 > >, gcop::SystemView< Normal< _n >, Vector2d >, gcop::SystemView< UuvState, Matrix< double, c, 1 > >, gcop::SystemView< pair< Matrix3d, Vector9d >, Matrix< double, c, 1 > >, gcop::SystemView< MbsState, VectorXd >, gcop::SystemView< Body2dState, Matrix< double, c, 1 > >, gcop::SystemView< pair< Matrix3d, Vector2d >, Vector2d >, gcop::SystemView< Vector4d, Vector2d >, gcop::SystemCeView< T, n, c, np, ntp >, gcop::Geom3dView, gcop::Kinbody3dTrackView< _nu >, gcop::Body2dTrackView, gcop::Body3dTrackView, gcop::Body2dGraphView, gcop::Posegraph2dView, and gcop::DemView.
References name.
Referenced by Render(), and gcop::Viewer::RenderViews().
| void View::Unlock | ( | ) |
Friends And Related Function Documentation
friend class Viewer [friend] |
Member Data Documentation
int gcop::View::id [protected] |
id
Referenced by gcop::Viewer::Add(), and gcop::Viewer::Remove().
pthread_mutex_t gcop::View::mut [protected] |
char gcop::View::name[256] [protected] |
The documentation for this class was generated from the following files:
